ROS 2シェル芸:URDFを置換してRVizで表示する
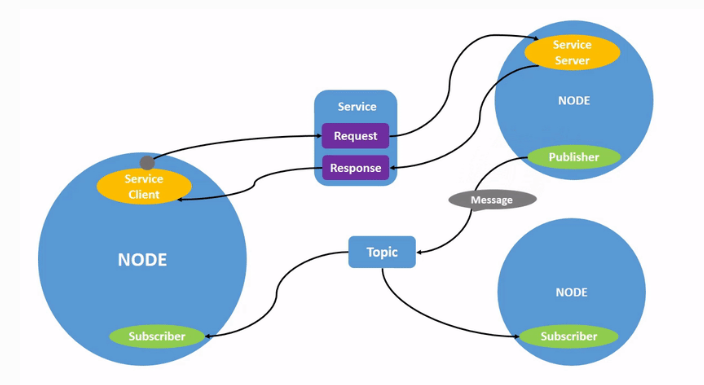
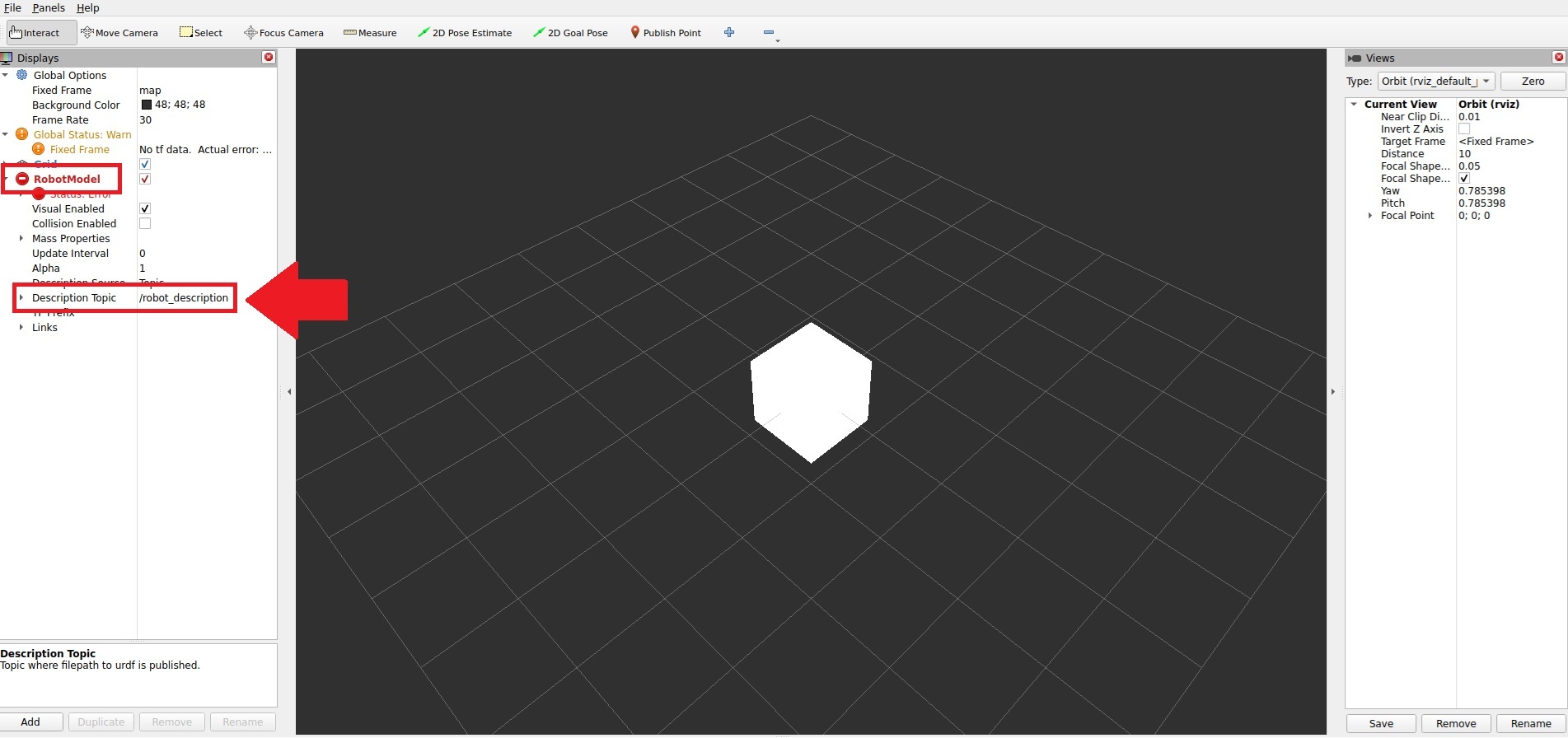
はじめに アドベントカレンダーについて この記事はQiitaのROS 2 Advent Calendar 2024の18日目の記事です。 12月1日から12月25日まで毎日ROS 2に関係した記事が投稿されるはずなので、そのほかの記事については下記のリンクからカレンダーをご確認ください。 ROS 2 Advent Calendar 2024 記事の概要 この記事ではURDFを置換してRVizで表示して遊ぶシェル芸を紹介します。 やはりROS 2においてURDFは必要不可欠な要素ではありますが、 イマイチどうやっていじっていいのかよく分からないことも多々あります。 また、無理やりでもいいからURDFを書き換えたいというケースもあるかもしれません。 そこで今回はとりあえずURDFを書き換えてみて、後のことはそれから考えようというコンセプトでやっていきます。 ぜひお付き合いいただけると嬉しいです。 とはいえ本題に入る前に、まずはあらゆる読者を想定してそれぞれのキーワードを簡単に説明しておきます。 ROS 2とは何か ROSはRobot Operating Systemの略称で、ロボットを動かすためのミドルウェアです。 豊富なライブラリやツール、コミュニティなどが備わっていてとても便利だと思います。 詳しくは下記の公式ドキュメントをご覧ください。 ROS 2 Documentation シェル芸とは何か シェルのワンライナーで様々なタスクをこなすことを指します。 詳しい定義や情報については下記のページをご覧ください。 シェル芸のトップページ URDFとは何か URDFはUnified Robot Description Formatの略称で、ロボットの情報を記述するためのXML形式のフォーマットのことです。主にROSで使われています。 URDFのwikiページ 参考資料 下記が参考資料です。 Qiita - ROS コマンドラインツール シェル芸 Qiita - turtlesimの亀をなるべく簡単にたくさん出したい Qiita - シェル芸で遊ぶROS 2 URDFを置換してRVizで表示する それではさっそく始めていこうと思います。 最低限のURDFを作成 まずは下記の内容をコピペしてcube.urdfを作成します。 不完全なURDFかもしれませんが、とりあえずはこれで遊べます。 <robot name="cube"> <link name="cube_link"> <visual> <geometry> <box size="1 1 1"/> </geometry> </visual> </link> </robot> RVizでURDFを表示 作成したcube.urdfをRVizで表示してみます。 robot_state_publisherにcube.urdfを渡すことで、robot_descriptionトピックとtfトピックを配信してくれます。 ...