はじめに
せっかくのゴールデンウィークなので家でもロボット開発をしてみようということで、 アールティのRaspberry Pi Mouse V3(通称:ラズパイマウス)を購入してみました。 最終的にはM5Stack製のスタックチャンと連携させるところまでやりたいと思っています。
注意: ちなみにラズパイマウスは自社製品ですが今回は個人開発です。宣伝とかではないです。
ラズパイマウスについて
下記写真がラズパイマウスです。ROS 2対応で2つの車輪が付いた移動ロボットです。

詳しい情報については下記リンクの公式ページで説明されています。
株式会社アールティ - Raspberry Pi Mouse V3
ラズパイマウスの上にスタックチャンを乗せたかったのでオプションキットのマルチLiDARマウントも追加で購入してみました。

ラズパイマウスのセットアップ
開封
私はラズパイマウスのフルキットを購入しました。

ちょうどRaspberry Piも欲しかったので手に入って良かったです。
環境
今回は下記環境をセットアップしました。
- Ubuntu Server 24.04 LTS
- ROS 2 Jazzy
セットアップに使用したPCはWindows 11です。
セットアップ
セットアップ手順は下記の公式チュートリアルに従いました。 基本的にはチュートリアル通りにセットアップを行ったのでこの記事では細かい説明は省略します。
RT Corporation Software Tutorials - Raspberry Pi Mouse
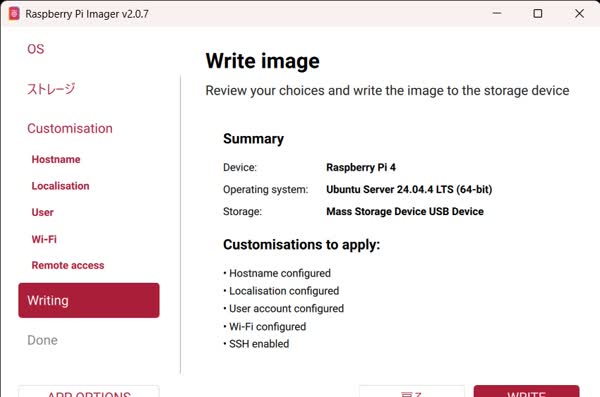
Raspberry Pi Imagerを久しぶりに使いましたが、Wi-Fiやsshの設定も一緒にできてやっぱり便利ですね。
OSを書き込んでラズパイマウスを起動した後、まずはデバイスドライバをインストールしました。 ちなみにRaspberry Pi 4Bをディスプレイに繋ぐためにはmicroHDMIケーブルが必要です。 私はディスプレイに繋ぐのが少々手間だったので最初からsshで接続しました。
デバイスドライバのインストールが完了したら次にROS 2 Jazzyをインストールします。 CLI版のUbuntu Serverを使用しているので、ROS 2もros-jazzy-ros-baseのほう(desktop版ではないほう)をインストールしました。
ROS 2 JazzyをインストールしたらラズパイマウスのROS 2パッケージもインストールします。 今回はaptでインストールしました。
以上でROS 2でラズパイマウスを動かすためのセットアップが完了しました。
ラズパイマウスでLチカをやってみる
セットアップが完了したのでラズパイマウスでLチカ(LEDをチカチカ点滅させること)を実施して動作確認してみます。
デバイスドライバ
まずは下記コマンドを実行してデバイスドライバのサンプルプログラムでLチカしてみます。
bash ~/RaspberryPiMouse/SampleProgram/step1.sh
Lチカできました。
ROS 2
次はROS 2でLチカします。
1つ目のターミナルで下記コマンドを実行してラズパイマウスのノードを起動します。
ros2 launch raspimouse raspimouse.launch.py
2つ目のターミナルで下記コマンドを実行してLEDを全て点灯させます。
ros2 topic pub -1 /leds raspimouse_msgs/msg/Leds '{led0: True, led1: True, led2: True, led3: True}'
led0: Trueだと点灯、led0: Flaseだと消灯です。下記コマンドではLEDを全て消灯させます。
ros2 topic pub -1 /leds raspimouse_msgs/msg/Leds '{led0: False, led1: False, led2: False, led3: False}'
Lチカできました。
以上で動作確認まで完了しました。
おわりに
今回はラズパイマウスをROS 2で動かすためのセットアップを実施しました。 この後はスタックチャンが届き次第、スタックチャンとラズパイマウスの連携をやってみようと思っています。 もしかしたらスタックチャン関係なく、ラズパイマウスを使ってROS 2の勉強とかもやってみるかもしれません。 ひとまずラズパイマウスが動かせるようになって良かったです。 それでは、また。